



【手腕模组】P56A-6
用于关节机器人的5.6轴,或者非标设备的末端旋转轴。
J5轴采用CSD17-2UF的谐波减速机。
J6轴采用CSD-14-2UH的谐波减速机。
详细描述
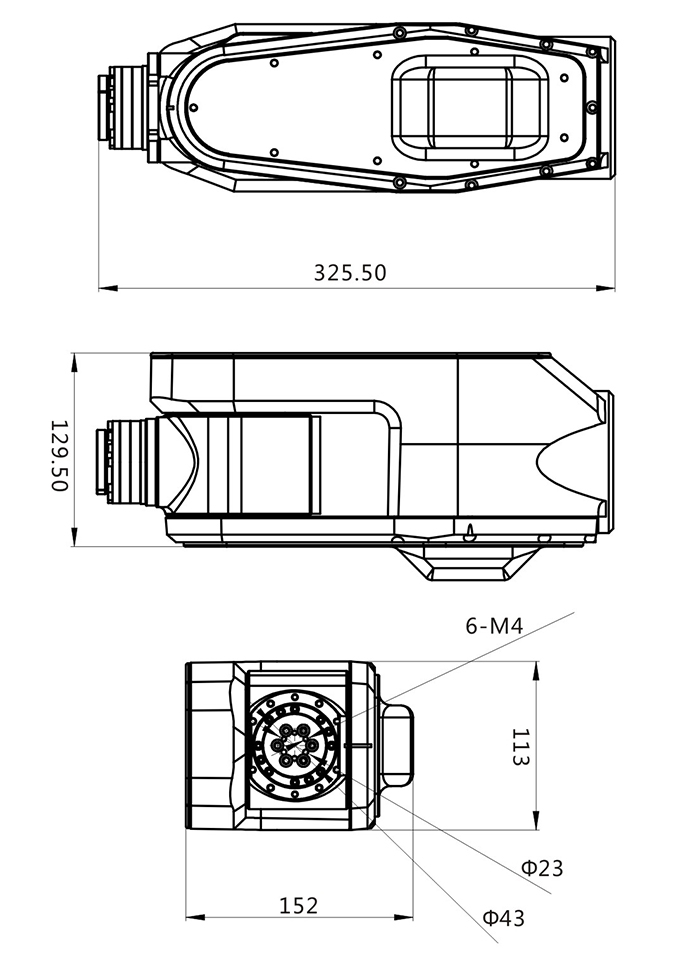
系列参数(单位:MM)
|
产品型号 |
P56A-6公斤 |
|
|
A |
外壳长度 |
129.5 |
|
B |
外壳高度 |
113 |
|
C |
总长度 |
345.5 |
|
D |
输出端螺钉孔分布圆 |
φ17 |
|
E |
输出端螺钉孔 |
M4 |
|
F |
输出端定位孔 |
φ8 |
|
G |
连接端螺钉孔分布圆 |
φ56 |
|
H |
连接端螺钉孔 |
M6 |
|
I |
P5减速比 |
57.3 |
|
J |
P5最大输出转矩(N.M) |
63.6 |
|
K |
P5额定输出转矩(N.M) |
18.22 |
|
L |
P5最大输入转速(N.M) |
6000 |
|
M |
P5额定输入转速(N.M) |
3000 |
|
N |
P6减速比 |
50 |
|
O |
P6最大输出转矩(N.M) |
55.5 |
|
P |
P6额定输出转矩(N.M) |
15.9 |
|
Q |
P6最大输入转速(N.M) |
6000 |
|
R |
P6额定输入转速(N.M) |
3000 |
|
S |
总重量(KG) |
3.5KG |
|
T |
安装方式 |
螺丝固定组装 |



 点击下拉
点击下拉

